
Cachorro Louco
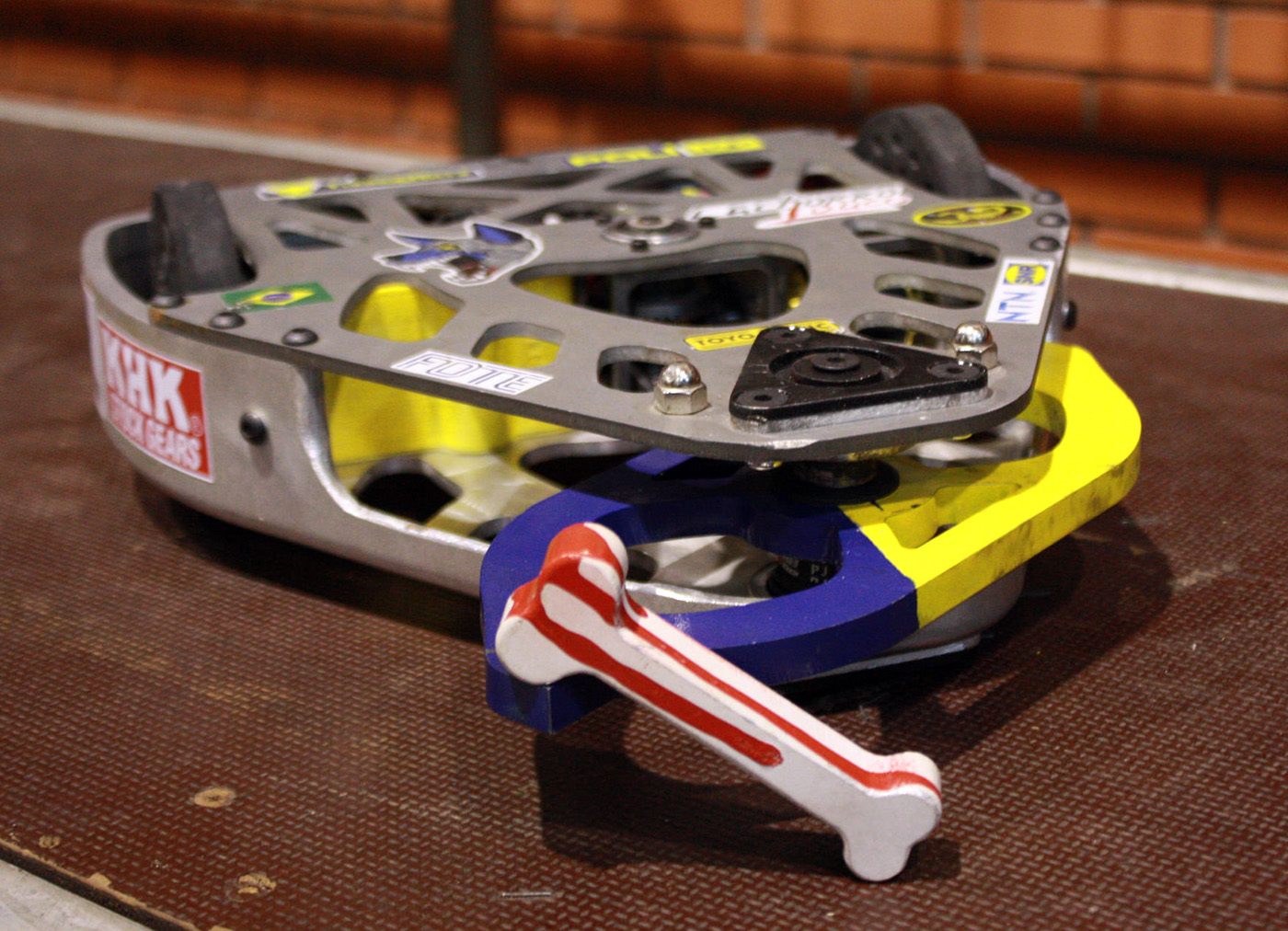
Na categoria Hobbyweight (5,5 kg) de combate, tendo como base exemplos internacionais de sucesso e também o aprendizado acumulado, a Equipe desenvolveu o Cachorro Louco: um robô com uma barra poderosa de aço 4340 tratado de 1 kg que gira a 6 mil rotações por minuto, com energia suficiente para lançar um oponente à 18 metros, sem comprometer sua agilidade e mobilidade.
O sistema da arma conta com uma transmissão por engrenagens cônicas de dentes helicoidais, fornecidas pela Kaishin, e uma transmissão por polias e correia micro-V. A fixação do conjunto de engrenagens e o motor brushless da arma se dá através de uma caixa feita de alumínio 7075-T6 totalmente usinada pela Maddza. Para os mancais são utilizados rolamentos fornecidos pela NTN-SNR.
A estrutura é inteiramente feita de alumínio 7075-T6, material amplamente utilizado na indústria aeronáutica devido à sua elevada resistência, leveza e usinabilidade. Em 2015, o Cachorro Louco sofreu uma reformulação e passou a utilizar uma base unibody simulada em software de CAE (Computer-aided engineering) e totalmente usinada pela Toyo Matic.
O robô utiliza em sua arma o motor brushless (não escovado) outrunner SII-3026-1190KV da Scorpion, muito conhecido por fornecer altos valores de torque, além de ter alta eficiência e durabilidade. Foi desenvolvida para este projeto uma eletrônica controladora dos motores DC Integy Matrix Pro Lathe 45T, utilizados em sua locomoção. Com o auxílio da Micropress, nossa parceira em tecnologia de PCBs, foi possível desenvolver e validar esta eletrônica muito potente e compacta (TPM-HobbyDC), a qual se mostrou uma solução bastante confiável para o controle de motores DC, sendo utilizada também em nosso time de Hockey, o Time Olympus.
Se estiver passando por uma competição de robótica e ouvir ao longe o hino “Louco, louco, louco!”, fique sabendo que faíscas voarão pois o Cachorro Louco está por ali!
{kind=link}
{kind=link}
{kind=link}
Social:
Endereço:
Av. Professor Mello Moraes, 2231
CEP: 05508-030
São Paulo, SP