
K-Torze
Nomeado em homenagem ao robô K2, do Team Velocity, o K-Torze teve sua estreia no Winter Challenge X, em 2014.
Em 2018, o K-Torze foi reprojetado visando corrigir uma fraqueza de sua versão anterior: a impossibilidade de "descapotar" sem auxílio externo. Após diversas pesquisas, simulações em softwares de CAE (Computer Aided Engineering) e testes empíricos, o resultado foi apresentado no Winter Challenge XIV, onde o K-Torze se tornou o primeiro e único robô com quatro rodas da categoria que conseguiu descapotar utilizando somente o efeito giroscópico de sua arma.
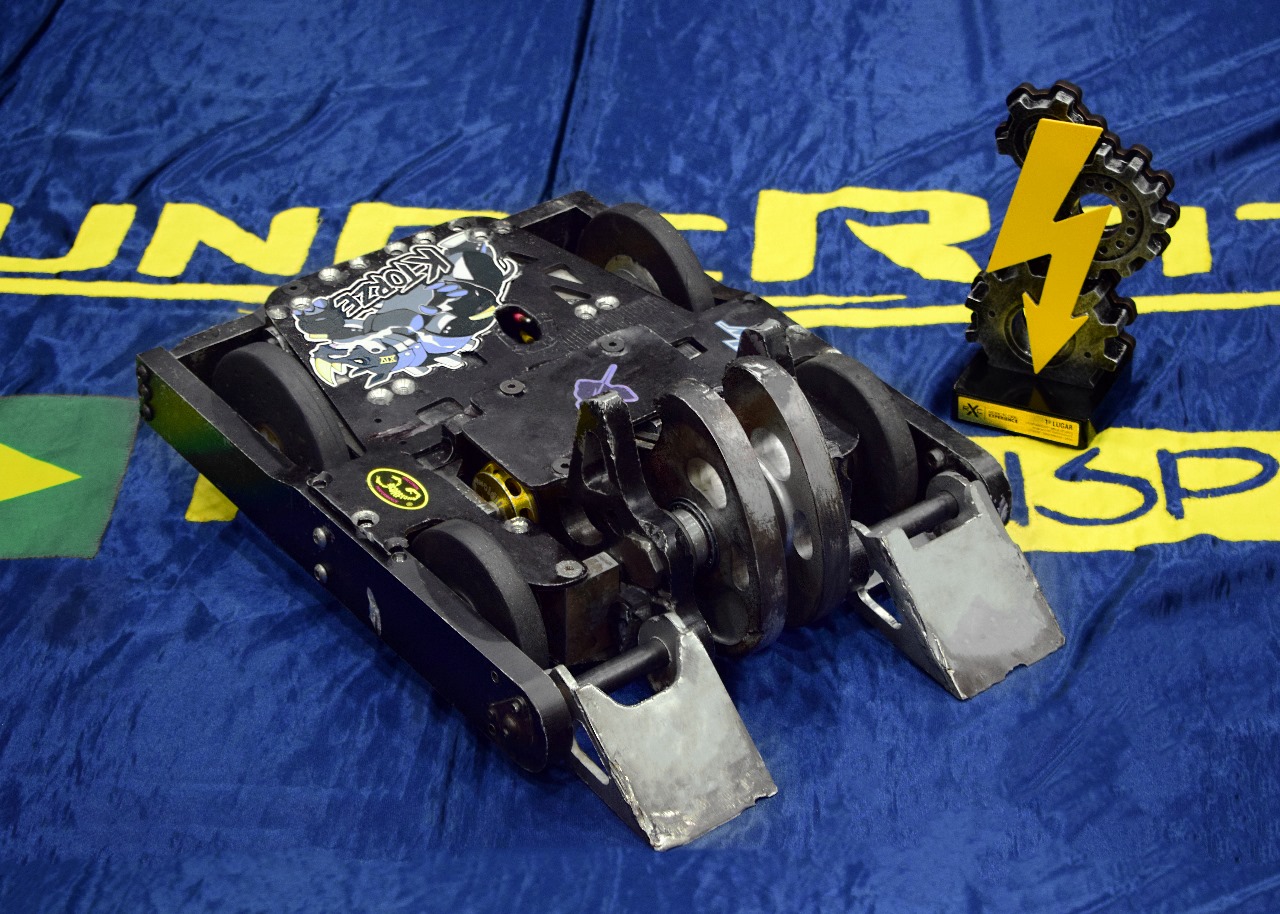
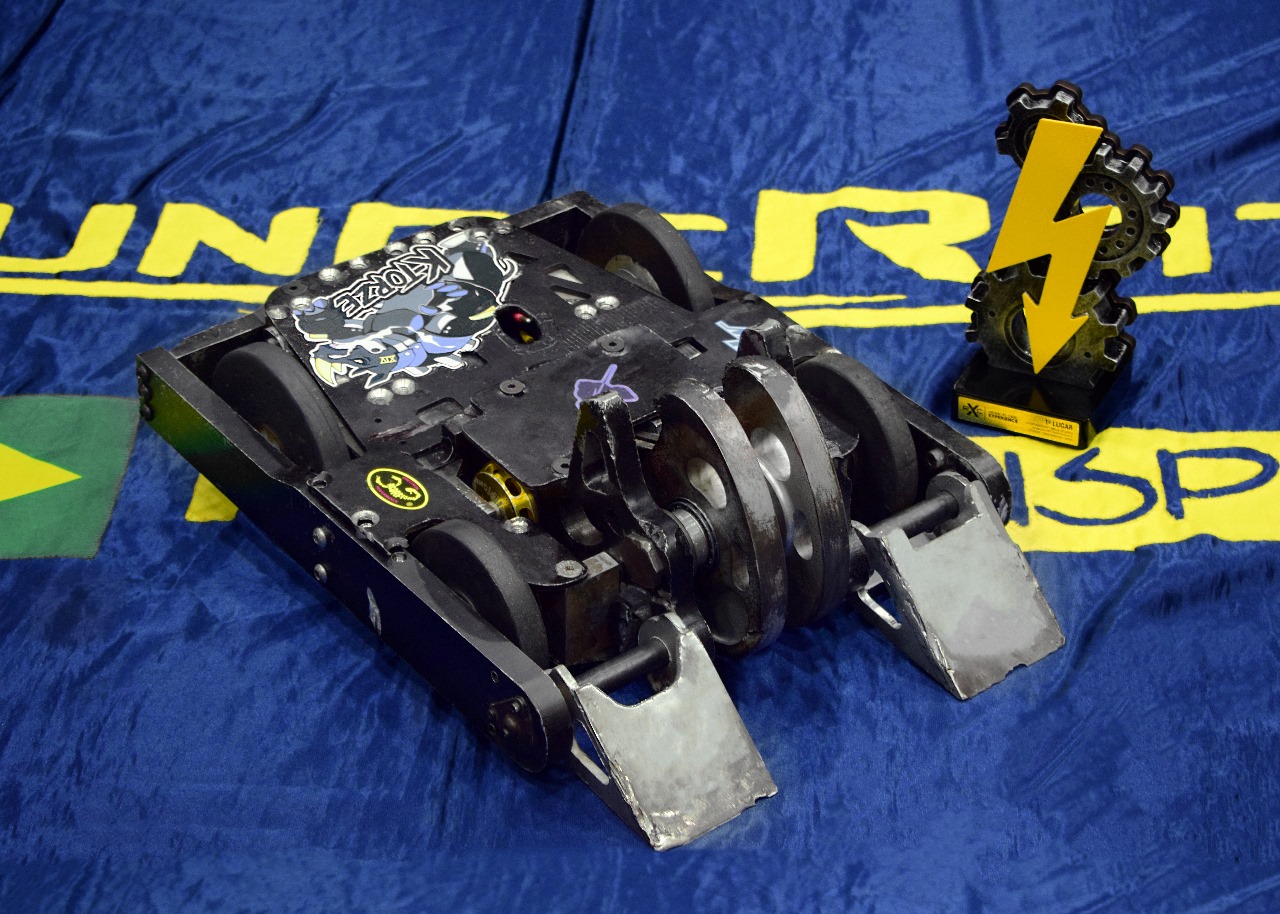
Sua estrutura é composta majoritariamente por três materiais: Alumínio Aeronáutico (7075), muito utilizado em aviões e na indústria automobilística; Hardox, um tipo de aço com alta dureza, amplamente utilizado em escavadeiras no campo da mineração; e fibra de carbono, compósito conhecido por sua baixa densidade e impressionante resistência. Cada material tem sua aplicação estudada, com base na resistência necessária para suportar impactos em diferentes regiões do robô.
O sistema da locomoção possui quatro rodas, tracionadas por dois motores brushless (não escovados) do modelo Scorpion SII-4035, cada um acoplado a uma caixa de redução 7.5:1, projetadas pela própria equipe, fazendo com que o robô atinja uma velocidade máxima de 35 km/h.
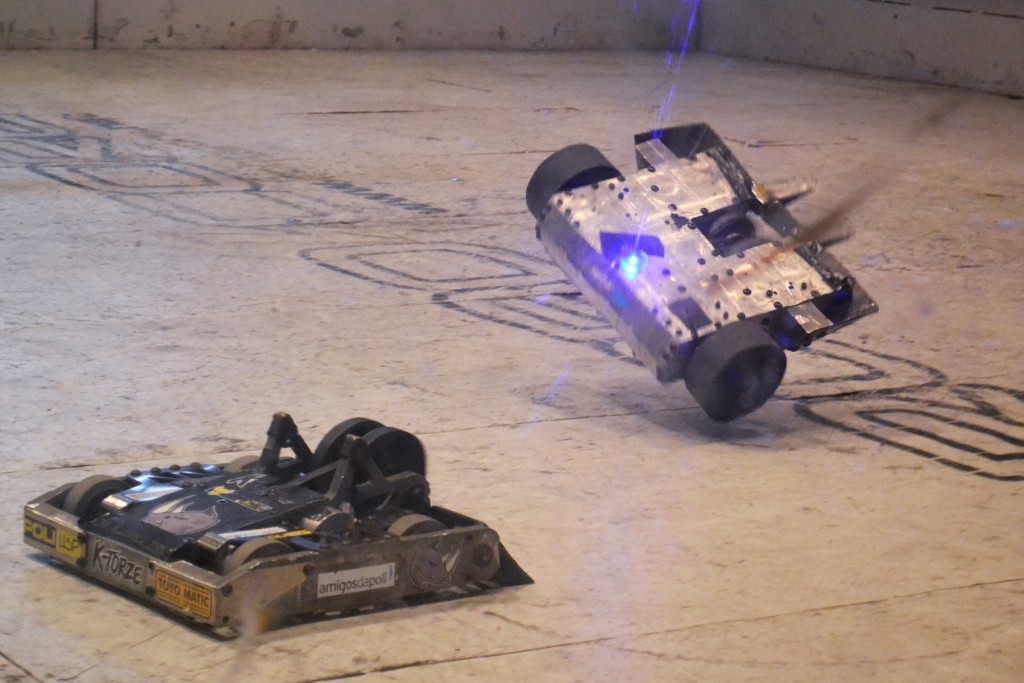
Já o sistema da arma pode ser separado em duas partes: um disco de impacto vertical, chamado de arma ativa, e as rampas basculantes, conhecidas como armas passivas. O sistema de arma ativa é composto por um motor brushless do modelo Scorpion HKIII-5025, que transmite o torque ao disco através de um conjunto polia-correia, atingindo uma velocidade angular de 7500 RPM. A combinação estratégica dessas armas fornece grande eficiência na destruição dos oponentes.
Ao fato de ser inteiramente movido a motores elétricos não escovados, o chamamos de um robô full-brushless. Esses motores oferecem uma ótima relação de peso e torque, garantindo o máximo aproveitamento da limitação de peso da categoria e máxima potência.
O conjunto de todos esses fatores e muito trabalho em equipe resulta em um robô extremamente confiável, ágil e resistente
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Social:
Endereço:
Av. Professor Mello Moraes, 2231
CEP: 05508-030
São Paulo, SP