
Categoria
Trekking
Estreia
2015
0
0
0
ThunderMaps
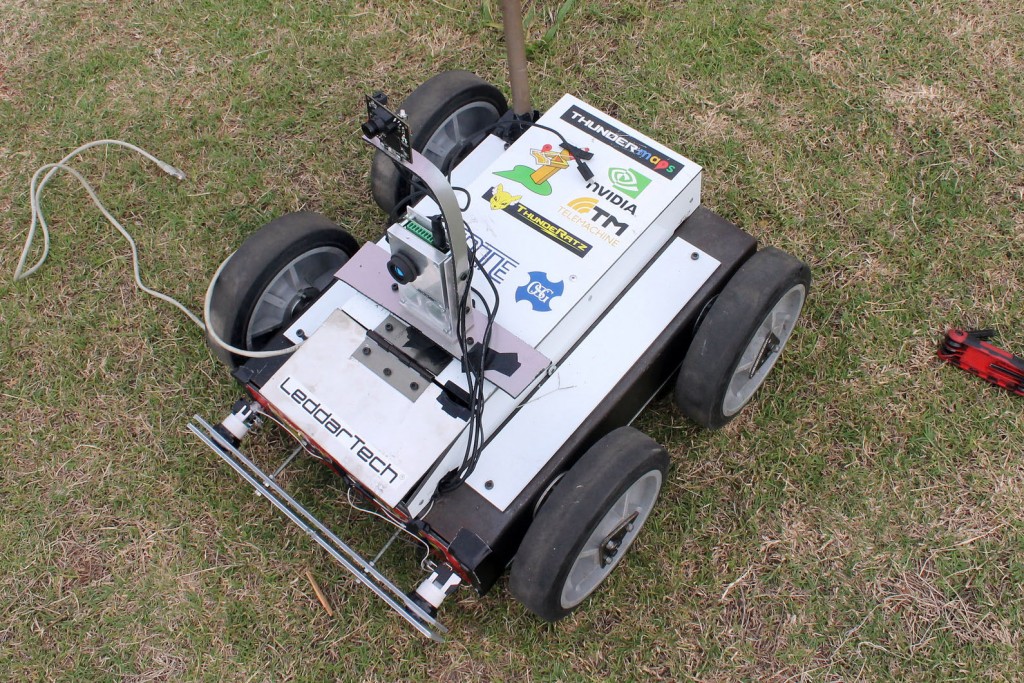
O ThunderMaps foi o segundo robô autônomo da equipe a competir na categoria Trekking. Ele foi criado com o objetivo de desenvolver novas funcionalidades para serem implementadas no ThunderWaze.
Sua estreia foi no Summer Challenge 2015, utilizando o Raspberry Pi 2, anteriormente usado no ThunderWaze. Serviu para testar pela primeira vez o sensor de distância da LeddarTech, apresentando bons resultados, conseguindo encontrar os cones sem o auxílio do processamento de imagens. Obteve 5º lugar por limitações mecânicas, que o impediram de obter o melhor tempo.
{kind=link}
{kind=link}
Social:
Endereço:
Av. Professor Mello Moraes, 2231
CEP: 05508-030
São Paulo, SP