
ThunderWaze
O ThunderWaze é um robô autônomo que compete nas categorias Trekking e RoboMagellan. Seu projeto desenvolveu novas áreas na equipe, como o campo de visão computacional, que é de extrema importância e será utilizado em projetos inteligentes futuros.
Criado para a categoria Trekking (brasileira), estreou em 2014 no Winter Challenge X, mas tornou-se também participante da RoboMagellan (equivalente ao Trekking, porém no âmbito internacional) na RoboGames 2015 (San Mateo, Califórnia), primeira competição internacional da equipe com a categoria. Em ambas o objetivo é criar um robô inteligente que saiba se localizar, localizar cones e alcançá-los em campo aberto no menor tempo. A categoria Trekking é mais simples, sem obstáculos e com 3 cones sobre quadrados brancos que devem ser atingidos ordenadamente. A RoboMagellan possui obstáculos a serem transpostos e o objetivo é atingir o cone final, sendo que há cones intermediários que dão descontos no tempo de prova.
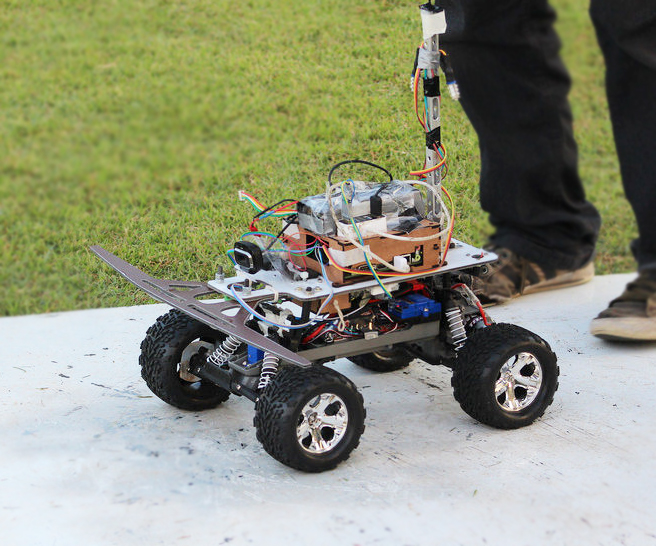
Como a competição ocorre em campo aberto, o robô é feito para não ficar preso em irregularidades, andando bem em terra, gramado e asfalto. Em versões anteriores, os materiais eram de baixo custo e a estrutura era simples. Atualmente, a estrutura é a de um automodelo rádio-controlado comercial adaptado pela equipe.
A eletrônica do robô é bastante rica em sensoriamento. Em suas primeiras versões, um Raspberry Pi (computador do tamanho de um cartão de crédito) realizava processamento dos dados lidos por seus sensores de GPS, bússola, sonares e câmera, um roteador era usado para programá-lo remotamente e algoritmos de processamento de imagem eram usados no Raspberry Pi. Em versões seguintes, uma CMUcam 5, câmera com processamento de imagem integrado, era usada para visão, reduzindo as necessidades de processamento no computador principal. Atualmente, é usada uma placa de desenvolvimento NVIDIA Jetson TK1 para todo o processamento dos sensores (GPS, bússola, encoder e ,futuramente, distância, proporcionado por um sensor de 16 segmentos da LeddarTech) e de imagens, capturadas por uma webcam. Placas de potência, controle de LEDs e de comunicação são projetadas e soldadas pela equipe. Códigos de competições passadas são open-source e estão disponibilizados no GitHub da ThundeRatz.
No âmbito da visão computacional, em versões anteriores, os cones eram identificados pela cor. Esse sistema mostrou-se não muito confiável, visto que outros elementos de cor semelhante ao cone poderiam atrapalhar e a forma como a luz solar incide sobre o cone altera sua cor. Portanto, atualmente, uma rede neural é utilizada para detectar os cones na imagem da webcam, representando uma grande avanço na visão computacional e na inteligência do projeto.
Medalhista desde sua estreia, conquistou o terceiro lugar no Winter Challenge X, pela categoria trekking e terceiro lugar na RoboGames 2015, pela categoria RoboMagellan. Devido a diferenças no regulamento das duas categorias e para torná-lo mais competitivo, alterações e reformas aceleradas foram feitas para a RoboGames 2015. Apesar das adaptações feitas em um curto espaço de tempo, o projeto obteve um ótimo resultado, tornando-se o primeiro robô de fora dos Estados Unidos a subir ao pódio da categoria RoboMagellan em mais de 10 anos de competição internacional.
{kind=link}
{kind=link}
Social:
Endereço:
Av. Professor Mello Moraes, 2231
CEP: 05508-030
São Paulo, SP