Sharkhai
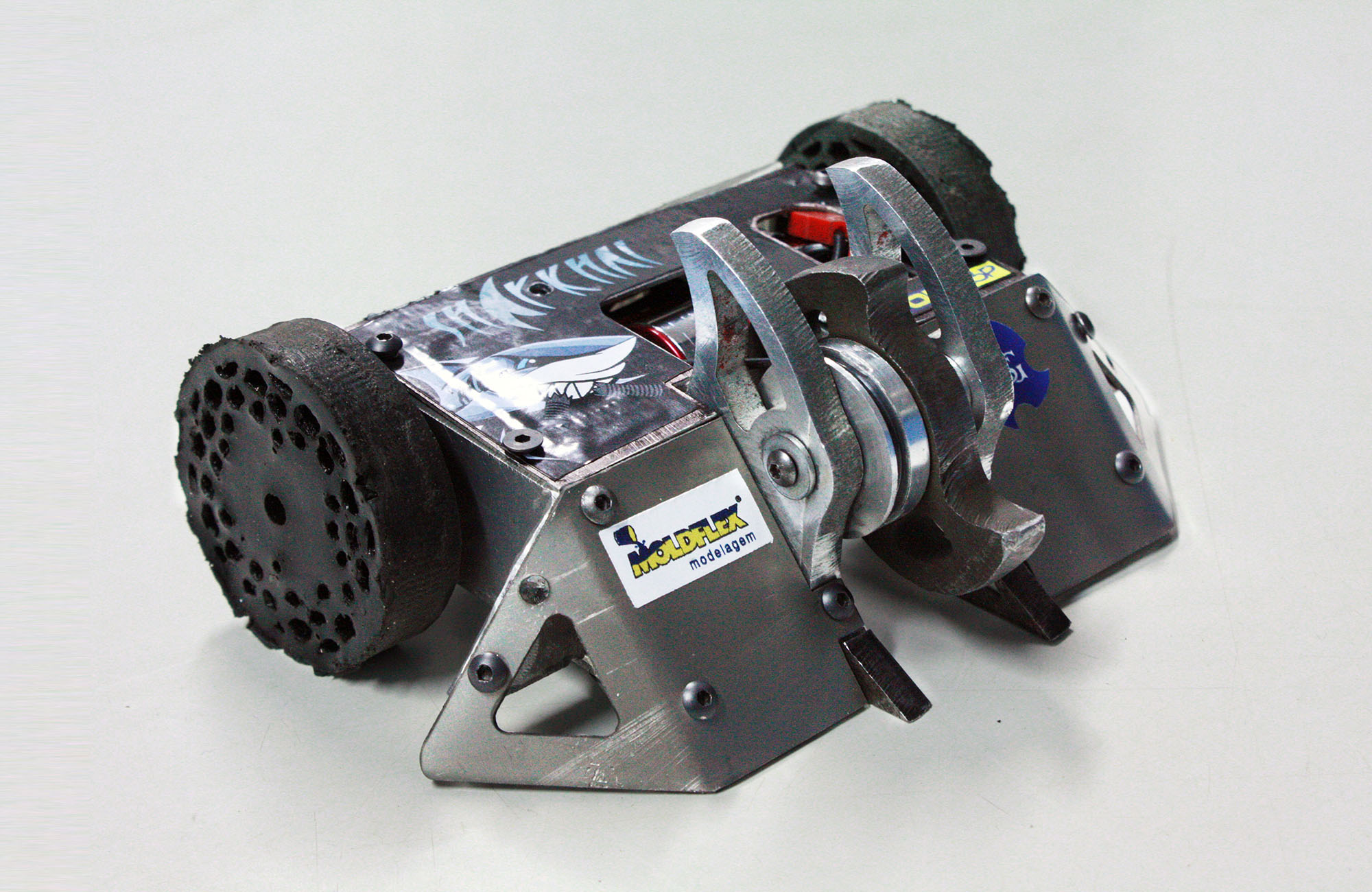
O Sharkhai é um robô da categoria Antweight (454g), que teve sua estréia nas arenas da Robogames 2016. O projeto teve seu nome inspirado pelo formato de sua antena, que é semelhante ao de uma barbatana de tubarão. Sharkhai é uma composição do termo em inglês Shark e do alemão Hai, ambos usados para designar esse predador marinho.
O projeto mecânico foi inspirado no robô K-Torze, que também utiliza uma arma vertical. Sua estrutura é composta por Fibra de Carbono, Titânio e Alumínio 7075 e sua arma de Aço 4340 tratado a 46 Rockwell C. Sua arma possui uma geometria otimizada, obtida através de softwares de otimização topológica e simulação de elementos finitos, visando conciliar o baixo peso exigido pela categoria com uma maior inércia, e assim causar maior dano ao adversário.
As rodas utilizadas no robô são de neoprene, material capaz de absorver grande parte da energia dos impactos sofridos durante o combate, garantindo que o eixo do motor, apoiado em dois rolamentos no mancal, não sofra danos significativos.
A eletrônica da locomoção tem apenas 24 x 23 mm e foi desenvolvida inteiramente pela equipe para a categoria Antweight. Essa eletrônica precisa ter o tamanho reduzido, devido às dimensões disponíveis no robô, porém deve suportar as correntes exigidas durante uma luta.
O circuito recebe os sinais de controle através de um receptor conectado à placa. Dessa forma, controla os dois motores escovados da locomoção diretamente e envia o sinal para uma BESC (Brushless Eletronic Speed Controller) que aciona um motor brushless, responsável por rotacionar a arma numa frequência de até 7800 RPM.
{kind=link}
{kind=link}
{kind=link}
Social:
Endereço:
Av. Professor Mello Moraes, 2231
CEP: 05508-030
São Paulo, SP