Duende
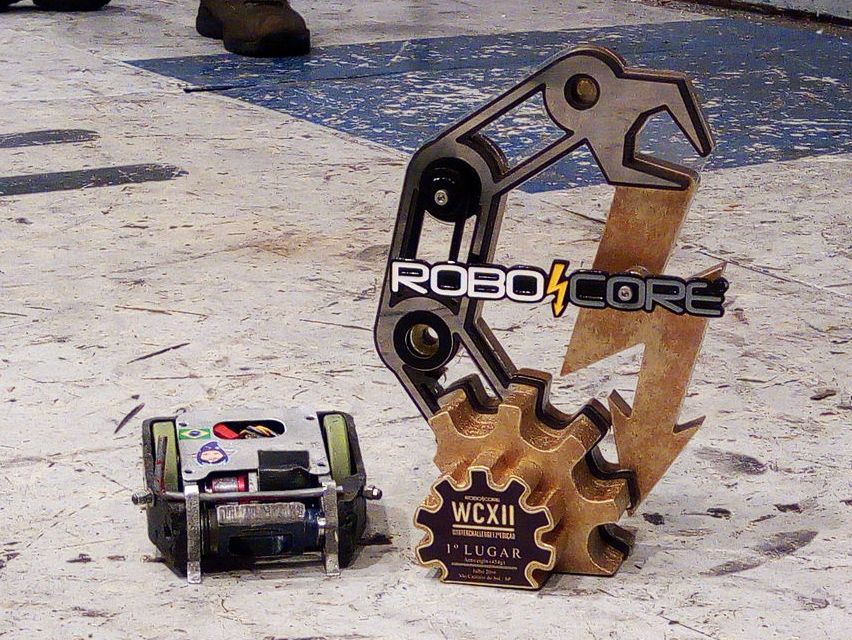
O Duende foi o primeiro robô da equipe na categoria Antweight, de 454 gramas. A ideia inicial do projeto contava com uma arma de impacto vertical do tipo tambor, contudo, para atender às restrições de peso da categoria e ainda maximizar sua inércia, optou-se por fazer um tipo de arma incomum nas competições brasileiras: o eggbeater, que representou uma grande inovação para a Equipe.
Sua estrutura foi inspirada em dois outros robôs de sucesso: K-Torze e Armagedrum. Ela foi fabricada utilizando o polímero UHMW, um plástico de engenharia de excelentes propriedades mecânicas e densidade reduzida em relação às ligas metálicas. Todas as peças foram simuladas e otimizadas para garantir a maior resistência e ainda foram projetadas de maneira que pudessem ser fabricadas nas oficinas da Universidade. O sistema de locomoção conta com dois motores Pololu Micro Metal Gearmotor 50:1 e rodas Banebots de 60mm de diâmetro.
O robô é controlado por uma eletrônica desenvolvida pela equipe, própria para a categoria Antweight, que recebe os dados e envia os comandos tanto para os motores da locomoção quanto para a ESC (Electronic Speed Controller) do motor brushless que é utilizado na arma. Com dimensões de apenas 24x23mm, este projeto é capaz de fornecer até 1,5A contínuos em cada canal, suportando picos de até 2A.
{kind=link}
{kind=link}
{kind=link}
Social:
Endereço:
Av. Professor Mello Moraes, 2231
CEP: 05508-030
São Paulo, SP